Riverscapes researchers have developed a new drone payload to map water surface elevation in rivers and streams. The new radar altimetry payload outperforms available alternatives such as photogrammetry and LiDAR. The
study has recently been published in Remote Sensing of Environment.
Water surface elevation (WSE), i.e. elevation of the water surface above mean sea level, is a primary variable for hydrologic/hydraulic monitoring. WSE has important implications for flood hazard and water resources protection. However, in-situ monitoring WSE stations are expensive to install and maintain. For this reason, new advanced technologies are needed to measure WSE also in small and remote streams at high spatial and temporal resolution.
A new payload solution was developed in the Riverscapes project to measure WSE with high accuracy from Unmanned Aerial Systems (UASs), as described in the newly published paper https://doi.org/10.1016/j.rse.2019.111487. The solution comprises i) a radar chip with full waveform capability ii) an accurate dual-frequency GNSS (Global Navigation Satellite System) receiver, as shown in Figure 1. WSE is estimated by subtracting the range measured by the radar from the GNSS-derived altitude. More information about the payload specification at WSE factsheet.
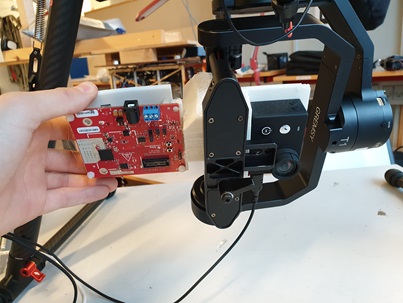
Figure 1, UAS-borne radar payload. The current radar is stabilized through a gimbal. The gimbal is also equipped with an RGB camera for airborne pictures and videos.
This radar solution is able to identify the range to the water surface also in challenging environments, such as small streams fully covered by riparian vegetation. Figure 2 shows the radargram for a flight above Åmose Å, Denmark (flight conducted on September 2018). Water is highly reflective in the microwave spectrum, thus the radar return from water is predominant compared to the return from both land and vegetation.
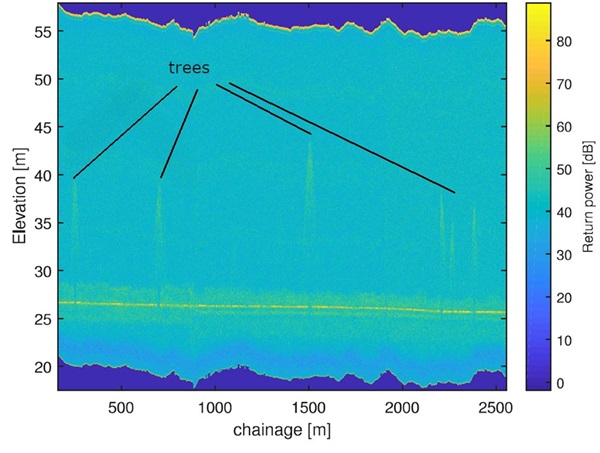
Figure 2, Colour map of the radar power returns in the flights above Åmose Å, DK (Flights in September 2018). X-axis shows river chainage, Y-axis shows the elevation bins (i.e. radar range bins subtracted from GNSS-derived altitude).
In multiple flights above the stream Åmose Å, we benchmarked the radar solution against in-situ ground truth observations retrieved with in-situ RTK (Real Time Kinematic) GNSS rover station. Figure 3 shows a comparison between ground truth and UAS-borne radar observations retrieved in different surveys. Our UAV-borne radar payload showed an accuracy of a few cm.
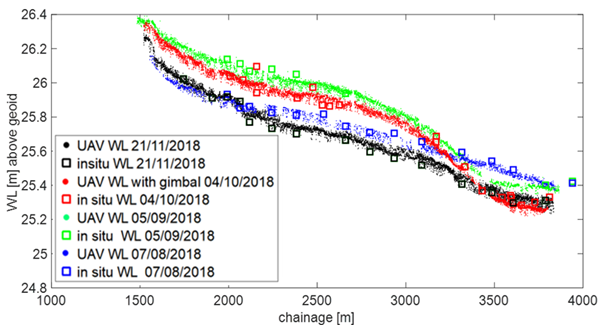
Figure 3, comparison between WSE estimates from UAS-borne radar and WSE ground-truth measurements retrieved with in-situ RTK GNSS rover.
In the paper published in Remote Sensing of Environment, we show that our UAS-borne radar solution outperforms the accuracy of other remote sensing technique such as UAS-borne photogrammetry and LIDAR. Figure 4 shows a comparison of the radar, LIDAR and photogrammetry observations extracted from the point cloud contained in the river mask.Both photogrammetry and UAS-borne LIDAR encounter problems when they need to estimate WSE:
- WSE is difficult to reproduce with photogrammetry: aquatic vegetation, lack of stable features on the water surface, and water transparency complicate reconstruction of WSE with the photogrammetry technique.
- UAS-borne LIDAR are generally not powerful enough to detect a sufficient number of reliable points on the water surface.
For this reason, in both techniques, WSE maps are generally produced by retrieving the elevation of data points acquired from dry locations (“water-edge”) adjacent to inundated areas. However, this technique is limited to streams when there is a clear water edge: vegetation (e.g. grass) covering the water-edge significantly affects the accuracy of the results.
Figure 4 shows a comparison of the observations obtained with the 3 different techniques, while Table 1 shows the accuracy and standard deviation of these observations.
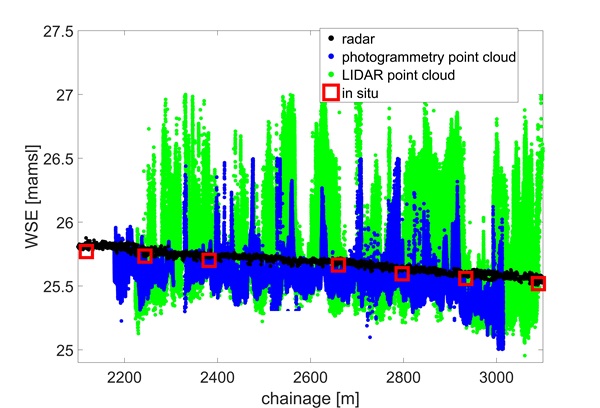
Figure 4, Comparison of radar, photogrammetry and LIDAR elevation values extracted from the point clouds. Figure reprinted from https://doi.org/10.1016/j.rse.2019.111487 with permission from Elsevier.
Table 1. Average Standard deviation (σ) is computed by averaging the standard deviation of the 5 meters intervals in which the stream reach was discretized. Mean Absolute Error (MAE), Mean Bias Error (MBE), Root Mean Square Error (RMSE) were computed by comparing the in-situ observations with the average of UAV observations obtained at intervals of 5 m, i.e. 2.5 m before and 2.5 m after the in-situ measurement location. Table reprinted from https://doi.org/10.1016/j.rse.2019.111487 with permission from Elsevier.
|
Technology
|
σ (m)
|
MAE (m)
|
MBE (m)
|
RMSE (m)
|
|
Radar
|
0.012
|
0.033
|
0.033
|
0.03
|
|
Photogrammetry DEM centerline
|
0.048
|
0.15
|
-0.151
|
0.164
|
|
Photogrammetry DEM “water-edge”
|
0.106
|
0.385
|
0.385
|
0.450
|
|
Photogrammetry
Point cloud contained in river mask
|
0.073
|
0.160
|
-0.160
|
0.180
|
|
LIDAR DSM centerline
|
0.120
|
0.238
|
0.076
|
0.358
|
|
LIDAR point cloud contained in river mask
|
0.15
|
0.159
|
0.033
|
0.2218
|
As shown in Table 1, our radar solution shows an accuracy has an accuracy of ca. 3 cm and a standard deviation of ca. 1.2 cm, which are both one order of magnitude better than photogrammetry and Lidar observations. Processing time is significantly faster with our radar solution compared to LIDAR and especially compared to photogrammetry solution. Radar observations can be acquired in a short time, without requiring significant human-computer interaction time. Lidar data can also be relatively fast to process, but significant human-computer computational time is required to identify the LIDAR points that are representing the water-edge. On the other hand, photogrammetry is more demanding both for survey and processing time. Photogrammetry requires multiple flight-strips to acquire images from different angles and altitudes, making the survey more time consuming, with a significant time that is required in the office to i) process the images and obtain the photogrammetry model and ii) identify the water edge. However, the main advantage of the LIDAR and photogrammetry, compared to radar, is the capability of producing a Digital Elevation Model of the riverbank topography, while radar is specifically developed for measuring WSE. Our radar payload is an efficient UAS-solution for fast and accurate WSE surveys, when high spatial resolution, high absolute accuracy, short survey and processing time are required. The paper describing all details has been published in Remote Sensing of Environment. Please contact Filippo Bandini if you are interested in a preprint of the article.